探索は、ロボット工学における自律ナビゲーションの重要な側面である。同時定位マッピング(SLAM)は、ロボットが未知の環境をナビゲートし、マッピングすることを可能にする基本的な技術である。視覚的同時定位マッピング(Visual Simultaneous Localization and Mapping、VSLAM)は、SLAMの特殊なタイプで、ロボットがカメラからの視覚入力を使ってリアルタイムで周囲をマッピングし、自身の位置、すなわちオドメトリを推定することを可能にする。この技術は、火星探査機、火星ヘリコプター、地上ロボット、水中ロボット、掃除機ロボットなど、さまざまなアプリケーションで広く使用されている。 深度画像のみを用いた自律移動ロボット(AMR)の自律ナビゲーションのために、飛行時間(ToF)カメラとRTAB-Mapがどの程度うまく機能するか調査が行われた。ToFカメラは赤外線(IR)と深度画像の両方を撮影する。深度画像は3D点群作成に利用される。RTAB-Mapは、この3D点群と車輪オドメトリを利用して、AMRの自律航法用に補正されたオドメトリと2D占有グリッドマップを出力する。
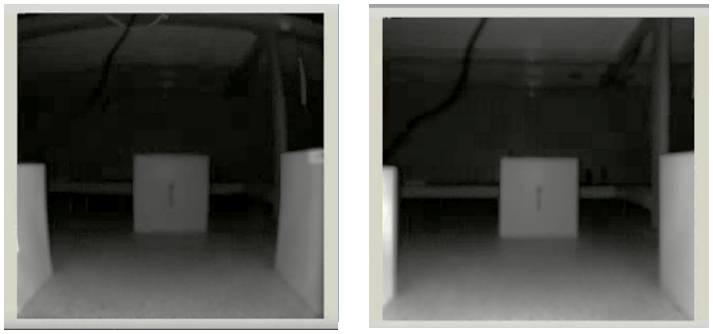
ToFカメラは、ADSD3100 TOF信号プロセッサを基盤とするアナログ・デバイセズの深度カメラです。ホストコンピュータへのUSB、イーサネット、またはWi-Fi接続に加え、組み込みプロセッサプラットフォーム上でのデータ処理をサポートします。 このToFカメラは、産業用、自動車用、民生用アプリケーションでの使用を想定して設計されています。飛行時間法を用いてシーン内の物体までの距離を計算し、正確な深度マップを作成します。ToFカメラは赤外線(IR)画像と深度画像の両方を提供し、図1に示されています。

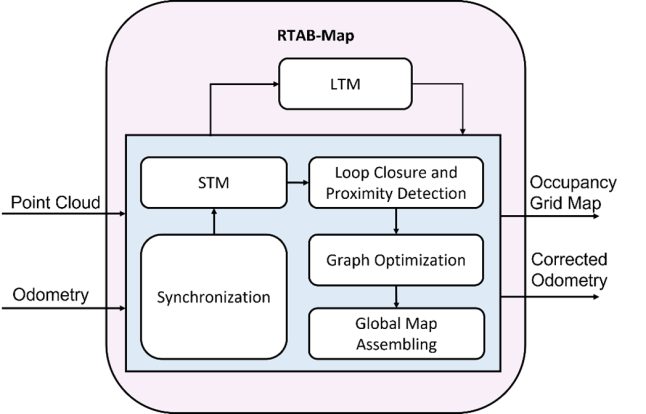
リアルタイム外観ベースマッピング(RTAB-Map)はグラフベースのSLAM技術である。RTAB-Mapは、大規模かつ長期のオンラインマッピングに対応するため、外観ベースのループ閉鎖検出手法とメモリ管理手法を組み込んでいる。 オドメトリ(すなわちAMRの姿勢)はRTAB-Mapへの外部入力である。したがって、車輪オドメトリ、視覚オドメトリ、ICPオドメトリなど、特定の用途に適したあらゆるタイプのオドメトリを使用できる。RTAB-Mapでは4種類の入力構成を利用可能である:
図2はRTAB-Mapの異なるブロックを示している。3D点群とオドメトリは、我々のユースケースにおいてRTAB-Mapが入力として使用するデータである。 さらに、2つの入力変換が必要である:オドメトリからベースリンクへの変換と、ベースリンクからカメラリンクへの変換。RTAB-Mapは、マップからオドメトリへの変換、2D占有グリッドマップ、補正済みオドメトリを出力する。RTAB-Mapノードは以下のブロックで構成される:同期化、短期記憶(STM)、長期記憶(LTM)、ループ閉鎖と近接検出、グラフ最適化、グローバルマップ構築。
rtabmap、ToFカメラ、ホイール-IMU融合オドメトリを使用してAMRの自律航法を実行するためのパイプライン全体を図3に示す。ホイール-IMU融合オドメトリは、ロバストなオドメトリを得るために、拡張カルマンフィルターの助けを借りて、ホイールエンコーダーデータとIMUデータを融合することで得られる。見てわかるように、7つのノードがあります:ToFカメラノード、image_procノード、点群ノード、rtabmapノード、ホイール-IMU融合オドメトリノード、Nav2ノード、Rvizノードです。次の段落では、これらのノードの機能を説明します。
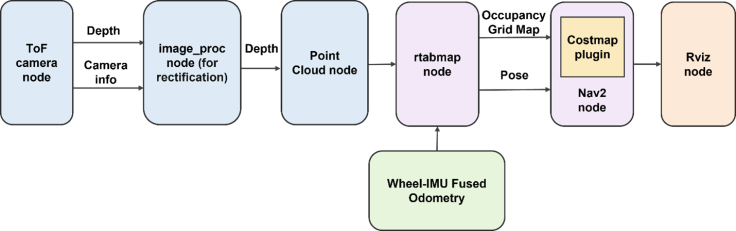
パイプラインの最初のノードはToFカメラノードで、赤外線画像と深度画像の両方をキャプチャします。キャプチャされた画像は、image_procノードによって、接線方向と半径方向の歪みを除去するために平行化されます。点群ノードは平行化された深度画像から3D点群を生成します。wheel-IMU融合オドメトリノードは、ホイールエンコーダとIMUデータを使用してAMRのオドメトリを推定します。rtabmapノードは、wheel-IMU融合オドメトリと生成された点群を使用して、2D占有グリッドマップと補正されたオドメトリ(つまり姿勢)を生成します。Nav2ノードは、生成された占有グリッドマップとオドメトリを使用して、AMRのパスプランニングと自律ナビゲーションに使用されるコストマップを生成します。最後に、Rvizノードが可視化ツールとして使用され、IR画像、オドメトリ、占有グリッドマップを表示します。また、AMRのゴールポーズの設定も可能です。全体として、このパイプラインは様々なセンサーとノードを組み合わせ、AMRの自律的なナビゲーションを可能にします。
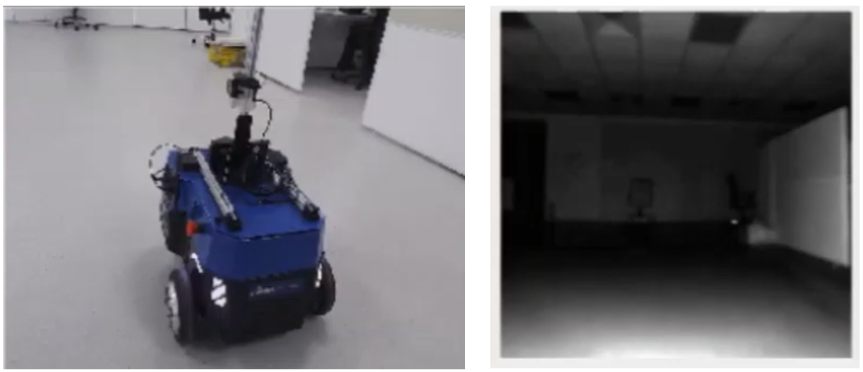
図3は、AMR本体に搭載されたRealSenseカメラが捉えた映像と、その結果として生成された3D点群マップをメッシュとして示している。図4は、生成されたマップに目標状態と計画経路を表示し、AMRが計画経路に沿って安全に目標状態に到達する様子を示している。
さらに、ToFカメラの補正深度画像を用いて生成された点群では、実世界の平面が点群内では曲面として表現される。この問題を解決するには後処理が必要である。図6は、点群フィルタリング前後の占有グリッドマップを示す。このウィンドウ内の青線は、自律移動ロボット(AMR)の推定オドメトリを表す。
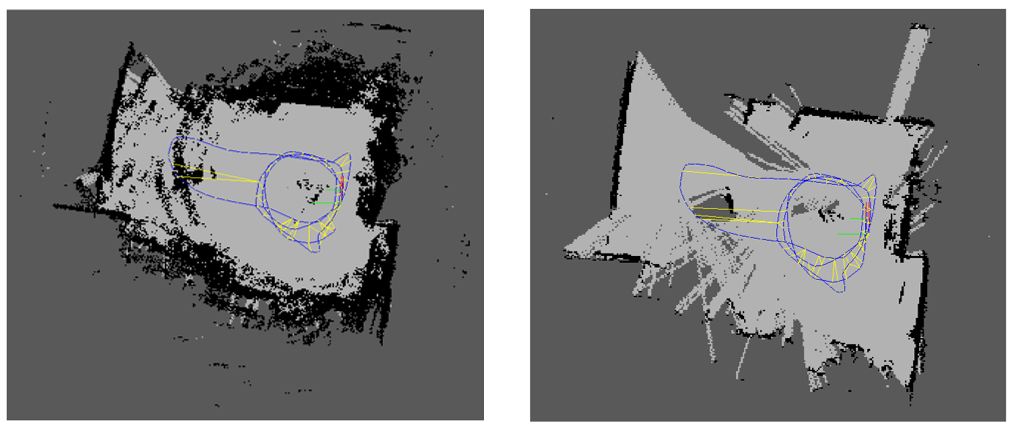
図6 左側のウィンドウは点群フィルタリング前の占有グリッドマップを示し、右側のウィンドウは点群フィルタリング後の占有グリッドマップを示している。両ウィンドウの青い線はAMRの推定オドメトリを表す。
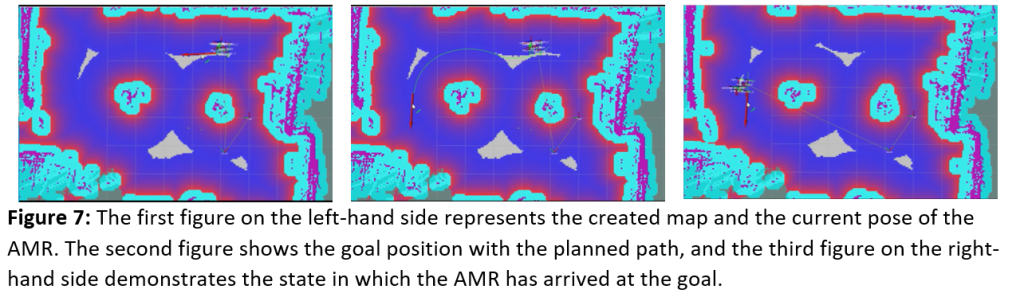
図7は自律航法プロセスの各段階を示している。左側の最初の図は、AMRの現在位置情報を含む生成済みマップを示している。このマップは、車輪-IMU融合オドメトリと点群データを用いてrtabmapノードによって生成される。 中央の2番目の図は、計画経路と共に目標位置を示しています。Rvizで目標位置が設定されると、Nav2ノードは占有グリッドマップとオドメトリ姿勢から生成されたコストマップを用いて経路を計画します。計画された経路は可視化のためにRvizに表示されます。 最後に、右側の3番目の図はAMRが目標状態に到達したことを示しています。経路が計画されると、AMRは補正されたオドメトリ姿勢とコストマップを用いて目標位置へナビゲートします。AMRは車輪-IMU融合オドメトリと占有グリッドマップを用いて自身の位置を継続的に更新し、計画された経路に沿うよう軌道を調整します。AMRが目標位置に到達すると停止し、ナビゲーションプロセスは完了します。
ToFカメラは、実験室環境における自律移動ロボット(AMR)の自律航行を実現するため、RTAB-MapおよびNav2スタックに統合された。AMRの自律航行にToFとRTAB-Mapを併用する過程で、様々な課題に直面した。ToFが提供する赤外線画像と深度画像は補正が必要である。未補正の深度画像は不正確なマップ生成の原因となるためだ。平面物体が点群データ上で湾曲して見える現象を確認したが、点群後処理により解決した。 RTAB-Mapに点群を供給する前にフィルタリング処理が必要です。並行して、AMRはToFの深度画像とRTAB-Mapアルゴリズムを用いて安全なナビゲーションのため、マップ構築と位置特定を実行しました。ToFカメラとRTAB-Mapを用いたAMRの自律走行成功例も確認されています。本実験結果は、様々な商用ロボティクスシステムにおけるToFの展開を加速すると考えられます。

サガル・ダトラク氏は2011年に電子工学の修士号を取得し、2021年に単眼視覚SLAMに関する博士論文を提出しました。現在はEinfochips(Arrow傘下の企業)でVSLAMの専門家として勤務し、視覚SLAMを用いた自律移動ロボットの自律航法に関する研究に従事しています。彼は約6年間にわたり、組み込みシステムやロボティクス関連のプロジェクトに携わってきました。

ヴィシャル・ラヴァルは電子通信工学の学士号(BE)を取得しています。現在はアロー傘下のEinfochips社でシニア組込みエンジニアとして勤務しています。IT分野で約8年の専門知識を有し、C、C++、LINUX、ROS2における熟練したプログラマーです。現在はToFセンサーを用いたビジュアルSLAMを活用した自律ロボットナビゲーションの研究に取り組んでいます。
当社の自動車ソリューションの専門家による30分間の相談を予約する
当社のバッテリー管理ソリューションの専門家による30分間の相談を予約する
当社の産業・エネルギーソリューションの専門家による30分間の相談会をご予約ください
当社の専門家による30分間の相談を予約する
