L'exploration est un aspect crucial de la navigation autonome en robotique. La localisation et la cartographie simultanées (SLAM) constituent une technique fondamentale qui permet aux robots de naviguer et de cartographier des environnements inconnus. La localisation et cartographie simultanées visuelles, ou Visual SLAM (VSLAM), est un type spécifique de SLAM qui permet aux robots de cartographier leur environnement et d'estimer leur propre position, c'est-à-dire l'odométrie, en temps réel à l'aide des données visuelles fournies par des caméras. Cette technique a été largement utilisée dans diverses applications, notamment les rovers martiens, les hélicoptères martiens, les robots terrestres, les robots sous-marins et les robots aspirateurs. Des recherches ont été menées pour évaluer l'efficacité de la caméra à temps de vol (ToF) avec RTAB-Map pour la navigation autonome de robots mobiles autonomes (AMR) en utilisant uniquement des images de profondeur. La caméra ToF capture à la fois des images infrarouges (IR) et des images de profondeur. L'image de profondeur est utilisée pour créer un nuage de points 3D. Le nuage de points 3D et l'odométrie sur roues sont utilisés par RTAB-Map pour générer une odométrie corrigée et une carte de grille d'occupation 2D pour la navigation autonome des AMR.
La caméra ToF est une caméra de profondeur d'Analog Devices basée sur le processeur de signal ToF ADSD3100. Elle prend en charge le traitement des données sur la plateforme de processeur embarqué, en plus de la connexion USB, Ethernet ou Wi-Fi à un ordinateur hôte. La caméra ToF est conçue pour être utilisée dans des applications industrielles, automobiles et grand public. Elle utilise la méthode du temps de vol pour calculer la distance par rapport aux objets présents dans la scène, ce qui lui permet de créer des cartes de profondeur précises. La caméra ToF fournit à la fois des images infrarouges (IR) et des images de profondeur ; elle est illustrée àla figure 1.

La cartographie en temps réel basée sur l'apparence (RTAB-Map) est une technique SLAM fondée sur les graphes. RTAB-Map intègre une approche de détection de boucles fermées basée sur l'apparence ainsi qu'une approche de gestion de la mémoire pour gérer la cartographie en ligne à grande échelle et à long terme. L'odométrie, c'est-à-dire la pose de l'AMR, constitue une entrée externe pour RTAB-Map. Par conséquent, tout type d'odométrie adapté à une application donnée peut être utilisé, y compris l'odométrie par roues, l'odométrie visuelle et l'odométrie ICP. Quatre configurations d'entrée différentes peuvent être utilisées avec RTAB-Map :
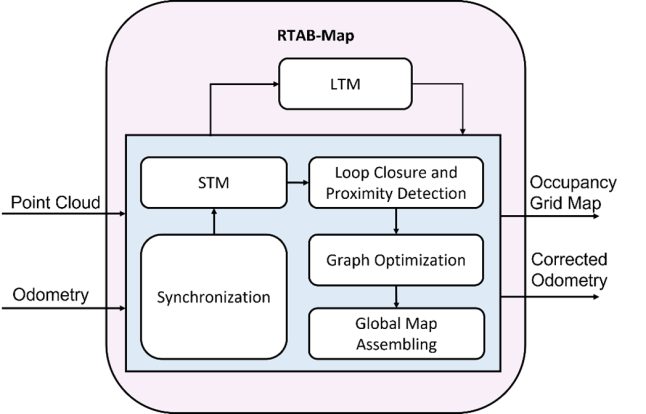
La figure 2illustre les différents modules de RTAB-Map. Un nuage de points 3D et des données d'odométrie constituent les données d'entrée utilisées par RTAB-Map dans le cadre de notre cas d'utilisation. De plus, il nécessite deux transformations d'entrée : la transformation odom vers base_link et la transformation base_link vers camera_link. RTAB-Map génère une transformation carte vers odom, une carte de grille d'occupation 2D et une odométrie corrigée. Le nœud RTAB-Map se compose des blocs suivants : Synchronisation, Mémoire à court terme (STM), Mémoire à long terme (LTM), Fermeture de boucle et détection de proximité, Optimisation du graphe et Assemblage de la carte globale.
La figure 3 présente l'ensemble du pipeline permettant d'assurer la navigation autonome de l'AMR à l'aide de rtabmap, d'une caméra ToF et d'une odométrie fusionnée roue-IMU. L'odométrie fusionnée roue-IMU est obtenue en fusionnant les données des codeurs de roue et celles de l'IMUà l'aide d'un filtre de Kalman étendu, afin d'obtenir une odométrie robuste. Comme on peut le voir, il y a sept nœuds : le nœud de caméra ToF, le nœud image_proc, le nœud de nuage de points, le nœud rtabmap, le nœud d'odométrie fusionnée roue-IMU, le nœud Nav2 et le nœud Rviz. Le paragraphe suivant explique le fonctionnement de ces nœuds.
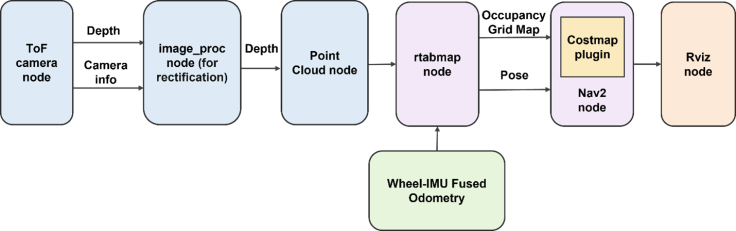
Le premier nœud du pipeline est le nœud de caméra ToF, qui capture à la fois des images infrarouges et des images de profondeur. Les images capturées sont ensuite rectifiées par le nœud image_proc afin d'éliminer les distorsions tangentielles et radiales. Les images infrarouges rectifiées sont utilisées pour la visualisation dans Rviz. Le nœud de nuage de points génère des nuages de points 3D à partir des images de profondeur rectifiées. Le nœud d'odométrie fusionnée roue-IMU estime l'odométrie de l'AMR à l'aide des codeurs de roue et des données IMU. Le nœud rtabmap utilise l'odométrie fusionnée roue-IMU et le nuage de points généré pour produire la carte de grille d'occupation 2D et l'odométrie corrigée (c'est-à-dire la pose). Un nœud Nav2 utilise la carte de grille d'occupation générée et l'odométrie pour générer une carte de coût qui est utilisée pour la planification de trajectoire et la navigation autonome de l'AMR. Enfin, le nœud Rviz est utilisé comme outil de visualisation pour afficher l'image IR, l'odométrie et la carte de grille d'occupation. Il permet également de définir la pose cible de l'AMR. Dans l'ensemble, le pipeline combine divers capteurs et nœuds pour permettre la navigation autonome de l'AMR.
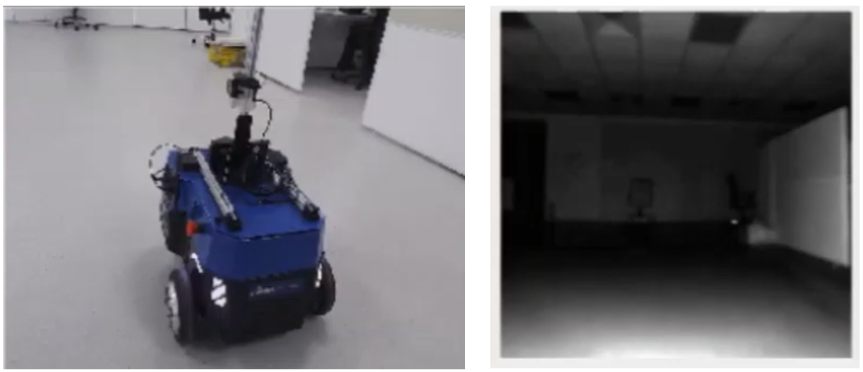
La figure 3présente le robot mobile autonome (AMR), ce qu’il perçoit grâce à la caméra RealSense qui y est fixée, ainsi que la carte de nuage de points 3D obtenue, représentée sous forme de maillage.La figure 4montre la carte générée avec l’état cible défini, le trajet planifié et l’AMR atteignant en toute sécurité l’état cible en suivant le trajet planifié.
De plus, le nuage de points généré à partir de l'image de profondeur rectifiée de la caméra ToF représente les surfaces planes du monde réel sous forme de surfaces courbes dans le nuage de points. Un post-traitement est donc nécessaire pour résoudre ce problème. La figure 6 montre la carte de grille d'occupation avant et après le filtrage du nuage de points. Les lignes bleues dans cette fenêtre indiquent l'odométrie estimée du robot mobile autonome (AMR).
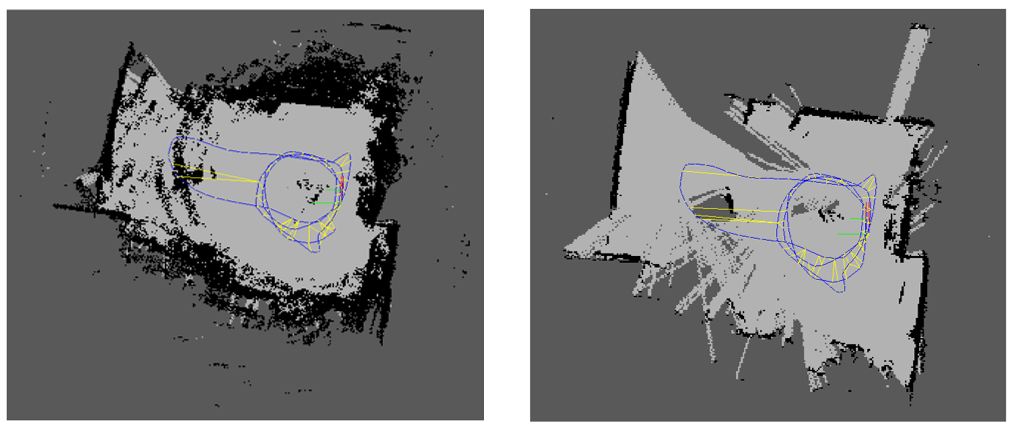
Figure 6 Lafenêtre de gauche présente la carte de grille d'occupation avant le filtrage du nuage de points, tandis que celle de droite montre la carte de grille d'occupation après ce filtrage. Les lignes bleues dans les deux fenêtres indiquent les données d'odométrie estimées du robot mobile autonome (AMR).
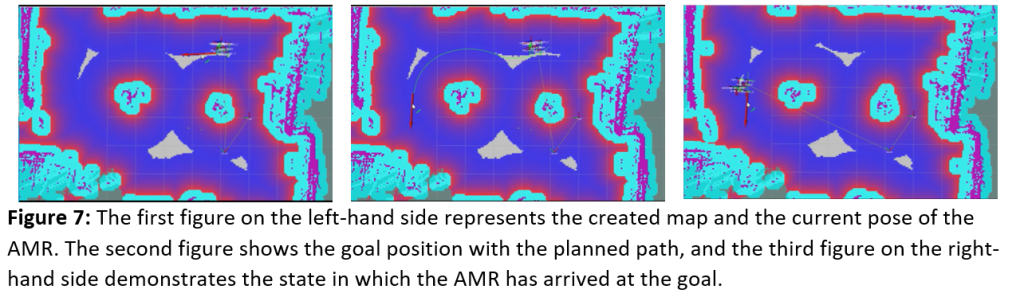
La figure 7illustre les différentes étapes du processus de navigation autonome. La première figure, à gauche, montre la carte générée avec la position actuelle de l'AMR. La carte est générée par le nœud rtabmap à partir de l'odométrie fusionnant les données des roues et de l'IMU, ainsi que du nuage de points. La deuxième figure, au centre, représente la position cible avec le chemin planifié. Une fois la position cible définie dans Rviz, le nœud Nav2 planifie un chemin à l'aide de la carte de coût générée à partir de la carte de grille d'occupation et de la position odométrique. Le chemin planifié s'affiche dans Rviz à des fins de visualisation. Enfin, la troisième figure à droite montre que l'AMR a atteint l'état cible. Une fois le chemin planifié, l'AMR utilise la pose odométrique corrigée et la carte de coût pour naviguer vers la position cible. L'AMR met continuellement à jour sa position à l'aide de l'odométrie fusionnée roues-IMU et de la carte de grille d'occupation, et ajuste sa trajectoire pour suivre le chemin planifié. Lorsque l'AMR atteint la position cible, il s'arrête et le processus de navigation est terminé.
Une caméra ToF a été intégrée à la pile RTAB-Map et Nav2 afin de permettre la navigation autonome de l'AMR dans un environnement de laboratoire. L'utilisation de la caméra ToF avec RTAB-Map pour la navigation autonome de l'AMR a posé divers défis. Les images infrarouges et de profondeur fournies par la caméra ToF doivent être rectifiées, car une image de profondeur non rectifiée peut entraîner une carte imprécise. Nous avons constaté que les objets plats apparaissaient courbés dans le nuage de points, ce qui a été résolu grâce à un post-traitement du nuage de points. Il est nécessaire de filtrer le nuage de points avant de le transmettre à RTAB-Map. En parallèle, l'AMR construisait la carte et localisait sa position sur celle-ci pour une navigation sûre à l'aide de l'image de profondeur provenant de la caméra ToF et de l'algorithme RTAB-Map. Nous avons également constaté la réussite de la navigation autonome de l'AMR à l'aide de la caméra ToF et de RTAB-Map. Nous supposons que les résultats de nos expériences accéléreront le déploiement de la technologie ToF dans toute une gamme de systèmes robotiques commerciaux.

Sagar Dhatrak a obtenu son master en sciences électroniques en 2011 et a soutenu sa thèse de doctorat sur le SLAM visuel monoculaire en 2021. Il occupe actuellement le poste de spécialiste VSLAM chez Einfochips (une société du groupe Arrow) et travaille sur la navigation autonome de robots mobiles autonomes à l'aide du SLAM visuel. Il travaille depuis environ six ans sur des projets liés aux systèmes embarqués et à la robotique.

Vishal Raval est titulaire d'une licence en ingénierie (BE) en électronique et télécommunications. Il occupe actuellement le poste d'ingénieur senior en systèmes embarqués chez Einfochips (une société du groupe Arrow). Il possède environ huit ans d'expérience dans le secteur des technologies de l'information. C'est un programmeur expérimenté en C, C++, Linux et ROS2. Il mène actuellement des recherches sur la navigation autonome des robots à l'aide du Visual SLAM et d'un capteur ToF.
Prenez rendez-vous pour une consultation de 30 minutes avec nos experts en solutions automobiles
Prenez rendez-vous pour une consultation de 30 minutes avec notre expert en solutions de gestion de batteries
Prenez rendez-vous pour une consultation de 30 minutes avec nos expertsen solutions industrielles et énergétiques
Prenez rendez-vous pour une consultation de 30 minutes avec nos experts
