コンピュータ・ビジョン・ソリューションとは、カメラとコンピュータ・ビジョン・アルゴリズムを使用し、機械が周囲の状況を認識・理解することを可能にするソリューションです。これは、視覚データをキャプチャして分析し、その情報に基づいてインテリジェントな意思決定を行うカメラの機能を組み合わせたものです。
エッジAIは分散型コンピューティングの一形態で、すべての計算がクラウドの外側、つまり集中型サーバーの「エッジ」で行われる。エッジ・コンピューティングのこの機能は、視覚データをキャプチャし、データのソースに近いデバイス上でローカルに計算を実行できるデバイスによってサポートされ、そのデータを即座に実行可能にする。データ分析と洞察のために、選択されたデータのみがクラウドに保存される。カメラを使用したエッジベースのAIソリューションを導入する場合、以下の点を考慮する必要があります:
- 画像とビデオの解像度と品質パラメーター
- 画像・映像処理の要件
- 計算 - エッジでの推論と意思決定のためのCPU、GPU、DSP、AIエンジン
- エッジとクラウドへの接続性
エッジAIソリューションの流れキャプチャ-プロセス-記録-分析-維持
キャプチャーの段階では、画像センサーの統合、特性評価、処理が行われる。これは、後続のサブシステムによってさらに処理される正しい画像/映像を得るための最初のステップである。キャプチャ・プロセスが入力として適切な画像/映像を提供したら、プロセス・ステージは、異なるユースケースやアプリケーションに基づく後処理ブロック、エンコード/トランスコード、およびそのようなデータのストリーミングで構成される。例えば、放送機器のストリーミング要件は、ヘルスケアのそれとは異なるが、遅延は両方のユースケースに共通の要件である。
記録段階は、録画、アーカイブ、オンデマンド視聴のサポートを提供する。テレマティクス、ドローン、ロボット工学、ヘルスケアなど、さまざまなユースケースには、解像度や記録保持のための法律への準拠といった側面を含め、記録とアーカイブに対するさまざまなニーズがある。
現在の状況では、AIがすべての中心的な役割を担っているため、アナライズの段階は非常に重要である。ここで計算ニーズが重要になり、アーキテクチャーが難しくなる。エッジとクラウドの間でAIの実装を分割することが重要である。維持段階では、使いやすさ、展開のしやすさ、機能強化、追加のデータセットに対するAIモデルの最適化などを可能にするオーケストレーションの実装が含まれる。
カメラサブシステムはマシンビジョンソリューションの中で最も重要な部品の一つです。カメラサブシステムは3つの主要な要素で構成されています:
- カメラ入力サブシステム
- コア・カメラ・サブシステム
- 異種コンピューティング・サブシステム
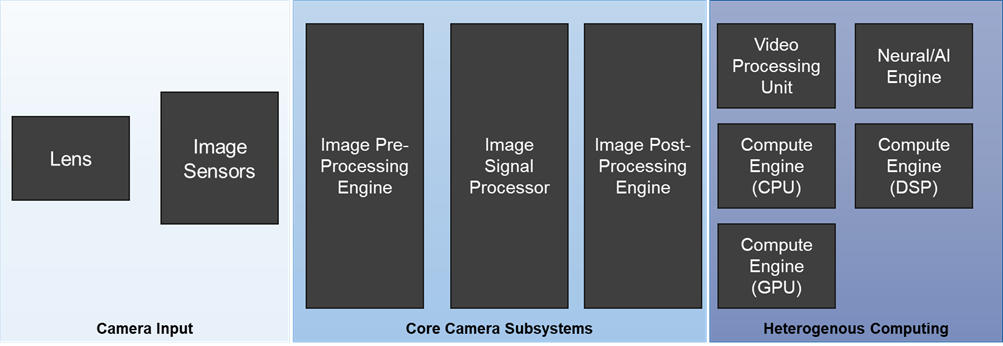
カメラ入力サブシステムはレンズとイメージ・センサで構成される。最終的な用途に応じて、使用されるイメージセンサーは1つまたは複数になります。ロボティクス・アプリケーションでは、センサー・フュージョンを実行するために異なるタイプの画像センサー(RGB、Time of Flight、LiDARなど)を利用します。個人診断用のヘルスケア機器には、異常を特定したり、測定値を取得したりするために、1つまたは複数のタイプの画像センサーが搭載されている場合があります。セキュリティや監視アプリケーションでは、一般的にRGBとIRの画像センサーが使用される。
レンズとイメージセンサーの選択は、ユースケースに大きく依存する。セキュリティや監視のアプリケーションでは、携帯電話に搭載されているセンサーと比較して、より高いピクセル密度と大きなピクセルサイズのセンサーが必要となります。同様に、検査システムには、ラインスキャンまたはエリアスキャンタイプのセンサーが必要です。
- 「光学系 "は、カメラが実際に興味のある対象を確実に捉える。
- 「照明条件、ダイナミックレンジ」は、画像内の最も明るい部分と最も暗い部分の間の相対的な強度を保持し、この情報を視覚アルゴリズムにできるだけ提供することを目的としている。
- "ターゲットの種類"-モーションキャプチャを伴わない使用例ではローリングシャッター、モーションキャプチャを伴う使用例ではグローバルシャッター。
- 「FoV" - 小売店分析のようなユースケースで、店舗に出入りする(人々の)より大規模なデータセットをキャプチャできる。
コア・カメラ・サブシステムは、前処理、画像信号処理、後処理ブロックから構成される。これらは、後続のサブシステムが解析や意思決定に使用する画質を向上させるために重要です。
ヘテロジニアス・コンピューティング・サブシステムは、ターゲットとするユースケースに基づく計算ニーズに焦点を当てている。重いAIモデルには、GPU、DSP、CPUを使用した推論を行う強力なAIエンジンが必要になる場合があります。セキュリティ/監視のユースケースで顔検出を行う場合、より良い推論を行うために、システム負荷と計算要件に基づいて、これらの計算エンジンのいずれかでモデルを実行することが不可欠です。設計上の主な考慮事項には、CPUコア、GPU、DSPの選択、および関連するKPI(浮動小数点処理、タイミング・レイテンシなど)が含まれ、これらは結果に影響を与えます。AIエンジンは一般的にTOPSで測定され、これは性能測定の方法として非常に宣伝されていますが、AIエンジンの性能にとって最も重要な指標は、1秒あたりの推論または推論レイテンシです。
カスタムカメラソリューションの設計における豊富な経験と深い専門知識を持つeInfochips社は、OEMが技術的な最先端を維持できるよう支援してきました。eInfochipsはArrowおよびクアルコムと共同で「Edge Labs」を設立しました。これは、クアルコムのサブジェクト・マター・エキスパート(SME)、エンドツーエンドの製品開発サービス、最先端のラボ、製品開発を加速するための機器を提供するセンター・オブ・エクセレンスです。また、最新のAIフレームワークやツール(Tensorflow、OpenCV、Python、Caffe、Keras)の使用経験もあります。さらに、eInfochipsは再利用可能なカメラフレームワーク(RCF)を開発し、市場投入までの時間を短縮し、開発工数を大幅に削減し、実証済みのテスト済み機能セットを提供しています。
詳細はmarketing@einfochips.comまでお問い合わせください。